Embedding Temporally Consistent Depth Recovery for Real-time Dense Mapping in Visual-inertial Odometry
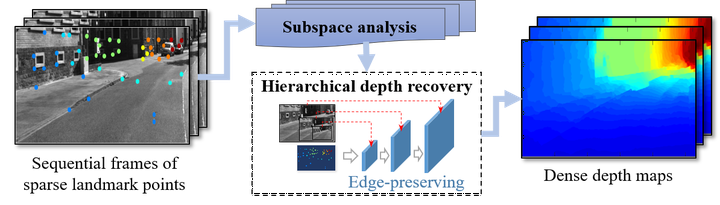 Photo by Jinhao He
Photo by Jinhao He
A method to embed depth recovery algorithm into VIO-based sparse visual SLAM system for real-time dense mapping.
- A subspace-based stabilization scheme to maintain the temporal consistency of visual landmarks.
- A hierarchical pipeline for edge-preserving depth interpolation.
- The whole pipeline is implemented using CPU only.
