Robust Visual Inertial Odometry With Consistent Sparsification
A hybrid solution integrating the features of adaptive sensor fusion, robust loss function, and consistent sparsification into a visual-inertial odometry (VIO) system, improving the system’s accuracy, robustness, and efficiency respectively.
- Switchable Constraints and Dynamic Covariance Scaling loss is use in visual residual to improve the robustness of the VIO system
- The weights of inertial residuals are adjusted adaptively according to the motion states of the system
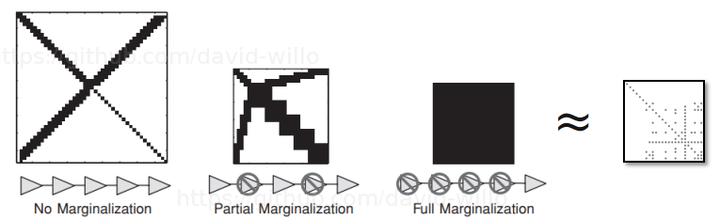
- the marginalized information matrix is consistently sparsified to reduce the fill-in effect